.jpg)
Minggu, 27 April 2014
skema rangkaian sederhana IC 4026 dengan Pus Button
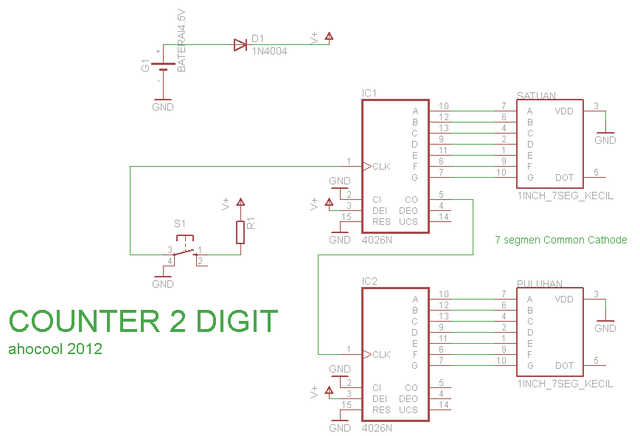
skema rangkaian digital dengan IC 4026 dan Seven Segmen Katoda
Original Posted By ahocool
PROJECT DIGITAL SEDERHANA
2 DIGIT UP COUNTER
Mau bikin papan skor sederhana ? gampang aja
kita manfaatkan project sederhana di posting terdahulu , yaitu memanfaatkan IC UP COUNTER CMOS 4026
IC CMOS ini sudah langsung bisa dihubungkan ke 7 segmen common katoda (negatif)
jika ingin membuat 2 digit lebih, maka kita cascade / hubung tingkat antar IC , jadi ketika IC pertama mencapai angka 5, maka output CO akan menjadi Low (0) dan ketika mencapai 0 akan menjadi High (1). perpindahan 0-1 akan mengakibatkan counter tambah 1 sehingga pin CO digit sebelumnya dapat menjadi input CLOCK ic dengan pembagian puluhan lebih lanjut
rangkaiannya seperti ini :
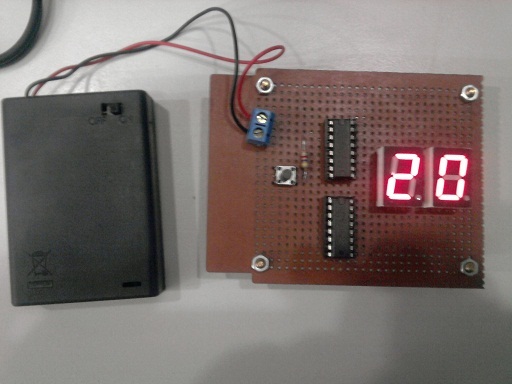
hasilnya di PCB lobang kira2 seperti ini , dimana untuk menambah nilai counter dilakukan dengan pencet tombol
Untuk menjadi papan skor sederhana, maka dibuat 2 buah rangkaian yang serupa, dengan menambahkan tombol "reset" (PULL DOWN 4k7 ohm seperti rangkaian tombol UP tapi logikanya terbalik / reset saat high) dihubungkan ke pin nomer 15 tiap IC
selamat mencoba
PROJECT DIGITAL SEDERHANA
2 DIGIT UP COUNTER
Mau bikin papan skor sederhana ? gampang aja
kita manfaatkan project sederhana di posting terdahulu , yaitu memanfaatkan IC UP COUNTER CMOS 4026
IC CMOS ini sudah langsung bisa dihubungkan ke 7 segmen common katoda (negatif)
jika ingin membuat 2 digit lebih, maka kita cascade / hubung tingkat antar IC , jadi ketika IC pertama mencapai angka 5, maka output CO akan menjadi Low (0) dan ketika mencapai 0 akan menjadi High (1). perpindahan 0-1 akan mengakibatkan counter tambah 1 sehingga pin CO digit sebelumnya dapat menjadi input CLOCK ic dengan pembagian puluhan lebih lanjut
rangkaiannya seperti ini :
hasilnya di PCB lobang kira2 seperti ini , dimana untuk menambah nilai counter dilakukan dengan pencet tombol
Untuk menjadi papan skor sederhana, maka dibuat 2 buah rangkaian yang serupa, dengan menambahkan tombol "reset" (PULL DOWN 4k7 ohm seperti rangkaian tombol UP tapi logikanya terbalik / reset saat high) dihubungkan ke pin nomer 15 tiap IC
selamat mencoba
Skema Rangkaian Digital IC 4033 dan IC 555






Selamat Membuat
anda pasti bisa..........
Senin, 31 Maret 2014

Robot Line Follower dengan LCD maret
Skema rangkaian simulasi buat Robot Line Follower

Listing Prongramnya
#include <mega16.h>
#include <delay.h>
#include <alcd.h>
void main(void)
{
DDRB=0xff;
PORTB=0x00;
lcd_init(16);
lcd_gotoxy(0,0);
lcd_putsf("ROBOT LINE");
delay_ms(400);
lcd_gotoxy(0,1);
lcd_putsf("FOLLOWER");
delay_ms(400);
while (1)
{
// robot keadaan maju
PORTB.0=1;
PORTB.1=0;
PORTB.2=1;
PORTB.3=0;
delay_ms(900);
// robot berhenti
PORTB.0=1;
PORTB.1=1;
PORTB.2=1;
PORTB.3=1;
delay_ms(400);
// robot keadaan mundur
PORTB.0=0;
PORTB.1=1;
PORTB.2=0;
PORTB.3=1;
delay_ms(900);
//robot berhenti
PORTB.0=1;
PORTB.1=1;
PORTB.2=1;
PORTB.3=1;
delay_ms(400);
// robot berbelok kekanan
PORTB.0=1;
PORTB.1=0;
PORTB.2=1;
PORTB.3=1;
delay_ms(900);
// robot berhenti
PORTB.0=1;
PORTB.1=1;
PORTB.2=1;
PORTB.3=1;
delay_ms(400);
// robot berbelok kekiri
PORTB.0=1;
PORTB.1=1;
PORTB.2=1;
PORTB.3=0;
delay_ms(900);
// robot berhenti
PORTB.0=1;
PORTB.1=1;
PORTB.2=1;
PORTB.3=1;
delay_ms(400);
};
}
Listing Prongramnya
#include <mega16.h>
#include <delay.h>
#include <alcd.h>
void main(void)
{
DDRB=0xff;
PORTB=0x00;
lcd_init(16);
lcd_gotoxy(0,0);
lcd_putsf("ROBOT LINE");
delay_ms(400);
lcd_gotoxy(0,1);
lcd_putsf("FOLLOWER");
delay_ms(400);
while (1)
{
// robot keadaan maju
PORTB.0=1;
PORTB.1=0;
PORTB.2=1;
PORTB.3=0;
delay_ms(900);
// robot berhenti
PORTB.0=1;
PORTB.1=1;
PORTB.2=1;
PORTB.3=1;
delay_ms(400);
// robot keadaan mundur
PORTB.0=0;
PORTB.1=1;
PORTB.2=0;
PORTB.3=1;
delay_ms(900);
//robot berhenti
PORTB.0=1;
PORTB.1=1;
PORTB.2=1;
PORTB.3=1;
delay_ms(400);
// robot berbelok kekanan
PORTB.0=1;
PORTB.1=0;
PORTB.2=1;
PORTB.3=1;
delay_ms(900);
// robot berhenti
PORTB.0=1;
PORTB.1=1;
PORTB.2=1;
PORTB.3=1;
delay_ms(400);
// robot berbelok kekiri
PORTB.0=1;
PORTB.1=1;
PORTB.2=1;
PORTB.3=0;
delay_ms(900);
// robot berhenti
PORTB.0=1;
PORTB.1=1;
PORTB.2=1;
PORTB.3=1;
delay_ms(400);
};
}
Langganan:
Komentar (Atom)